|
||||||
| Institut THOMASTA : Quelles seront les nouvelles technologies de demain ? | ||||||
|
||||||
|
||||||
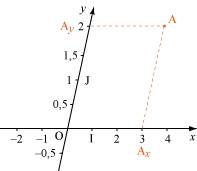
Repérage dans le plan et calcul vectoriel En utilisant les nombres réels, on a pu associer à chaque point d’une droite munie d’un repère (O, I) un nombre appelé son abscisse. On peut de même associer à chaque point d’un plan muni d’un repère (O, I, J) deux nombres qui sont les coordonnées du point. Dans un plan muni d’un repère, on peut calculer les coordonnées d’un vecteur et effectuer différents types de calcul vectoriel pour résoudre des problèmes de géométrie. 1. Comment repérer un point dans un plan ? On commence par définir un repère du plan : un repère du plan est un triplet de points non alignés (le mot triplet signifie que les trois points considérés sont ordonnés). En général, on appelle le repère (O, I, J), où O est l’origine du repère ; la droite (OI) est l’axe des abscisses et la droite (OJ) est l’axe des ordonnées. Ensuite, à l’aide du repère, on associe à un point un couple unique de nombres réels en traçant des parallèles aux axes passant par le point.
Cherchons par exemple les coordonnées de A sur la figure ci-dessus. On note On détermine les coordonnées de A en prenant : pour l’abscisse de A, l’abscisse du point pour l’ordonnée de A, l’abscisse du point Ici, les coordonnées du point A sont (3 ; 2). Remarques
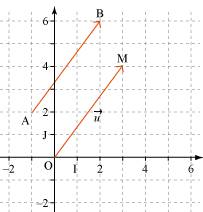
2. Comment définir un vecteur ? Quand deux vecteurs sont-ils égaux ? Soit un plan dans lequel on a défini une unité de longueur. Un vecteur
Le vecteur
Autrement dit : Ou encore :
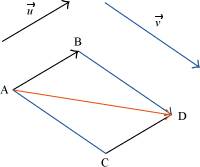
3. Quelles opérations peut-on effectuer sur des vecteurs ? La somme de deux vecteurs est un vecteur que l’on peut construire de deux façons : — avec la relation de Chasles en partant d’un point A :
— avec la règle du parallélogramme :
Remarque La relation de Chasles sert aussi à décomposer un vecteur en une somme de vecteurs. Si A et B sont deux points donnés, alors, pour tout point C, on a : On définit la multiplication d’un vecteur par un réel de la manière suivante. Soit
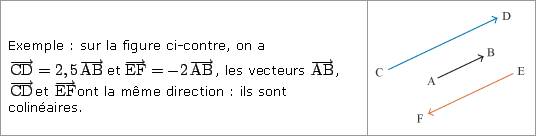
Si k = -1, alors On appelle vecteurs colinéaires des vecteurs qui ont la même direction. Les vecteurs
4. Quelles sont les bases du calcul vectoriel ? Dans un plan muni d’un repère (O, I, J), à tout vecteur Par définition, les coordonnées de
Il en découle que deux vecteurs Il est facile de calculer les coordonnées d’un vecteur Soit
Soit deux vecteurs de coordonnées La colinéarité des deux vecteurs
Elle se traduit aussi plus simplement par une égalité de proportionnalité dite des « produits en croix » :
Par exemple, les vecteurs Si A et B sont deux points de coordonnées respectives
À retenir absolument Un repère du plan est un triplet de points non alignés. À chaque point du plan, on associe un couple unique de nombres réels, ses coordonnées, en traçant des parallèles aux axes passant par ce point. Dans un plan muni d’une unité de longueur, un vecteur La somme de deux vecteurs Les vecteurs
|
||||||
|
Prof.: Thomas TAMENOU - Thomasta.com -
Contactez-nous |
||||||
 |